
The traditional categories and new challenges. Many schools are taking part for the first time
They overcome obstacles, identify light sources, kick balls and perform pirouettes, but they cannot do without ‘bolts and screws’. These are the robots built and programmed by the students participating in the RomeCup 2025, from 7 to 9 May in the capital.
18th International City of Rome Robotics Trophy
The 18th edition will feature 110 teams from 25 Italian schools. The categories in the competition are: Rescue Line (primary and secondary), On Stage (preliminary and advanced), Soccer (Open league and Light weight league), Explorer (Junior and Senior).
Two other competitions have been added to the traditional categories of the Trophy:
- the second Italian ‘SuperTeam’ championship, thanks to an agreement with Robocup Junior Italia, an international organisation for robotics competitions, in which nine teams are participating.
- The challenge between robotic arms, which will come into full swing after its debut in 2023. The Robotic Arm Challenge can be entered as a Single team challenge, independently, or as a Contest challenge with a university. The contest is the result of a collaboration between the Avogadro high school in Vercelli (teacher Luca Oliva) and the Canudo-Marone-Galilei high school in Gioia del Colle in the province of Bari (teacher Umberto Chimenti).
The updated rules are available at romecup.org
HOW THE CHALLENGES WORK
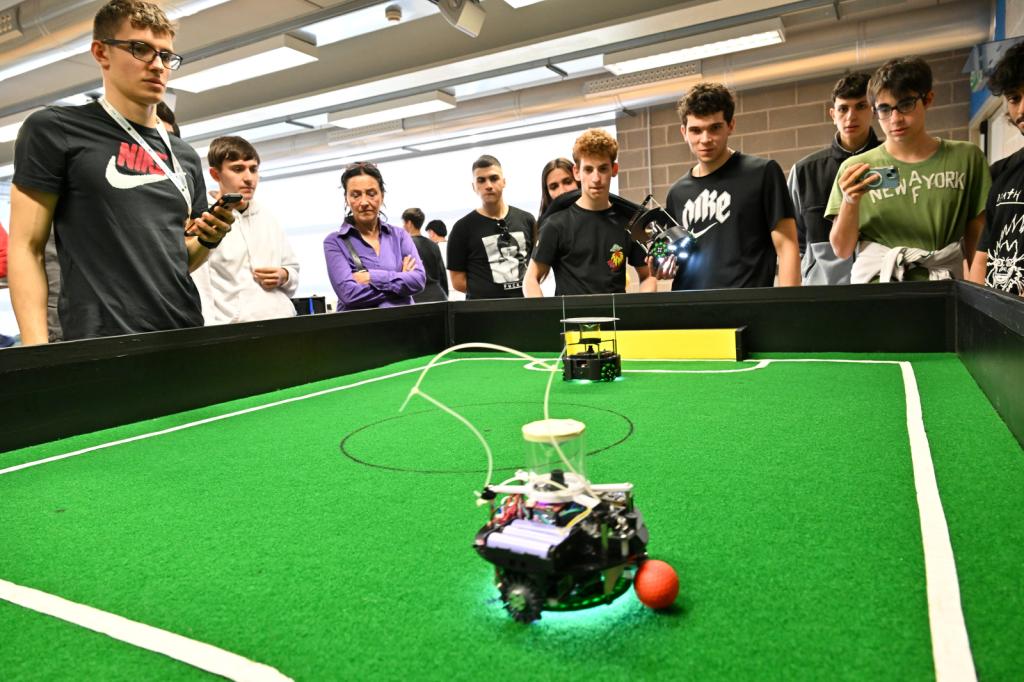
ROBOT FOOTBALLERS (SOCCER)
In the Soccer category, the robots play completely autonomously, without being remote-controlled, passing, dribbling and scoring goals in a fully automated manner. Matches are played in two halves of 10 minutes each, with a 5-minute break in between. To detect the ball, the robots use different detection systems depending on the category: In the Light Weight League, the ball (RoboSoccer Ball) emits infrared radiation, which is detected by the robots' sensors. In the Open League, a passive orange ball is used, which is detected using artificial vision techniques and other sensors. To move accurately and safely around the pitch, the robots are equipped with ultrasonic sensors, which detect obstacles and walls by calculating the return time of the pulse. An electronic compass provides the on-board computer with the necessary orientation for navigation and to avoid directional errors, such as own goals. Some robots integrate mechanical or pneumatic systems to hold (Roller) and kick (Kicker) the ball. The playing field measures 122 x 183 cm and consists of a green carpet on a rigid surface. The two categories have the same maximum dimensions for robots (22 cm in height and diameter), but differ in weight and power: maximum 2,400 g, 15 V power supply for the Open League; maximum 1,100 g, 12 V power supply for the Light Weight League.
RESCUE ROBOTS (RESCUE LINE)
Designed to intervene in critical scenarios, such as earthquakes or urban disasters, Rescue Robots are programmed to move autonomously in hostile environments, climb steps, avoid obstacles and locate people in need of rescue thanks to intelligent sensors. During competitions, the robots simulate rescue missions in a modular field consisting of 30 x 30 cm tiles, the layout of which is only revealed on the day of the competition, making each course unique and unpredictable. The track includes smooth or fabric surfaces (linoleum or carpet), steps up to 3 mm high, obstacles, bumps, and variations in light and magnetic fields. The robot follows a black line marked on the ground, facing unexpected events and difficulties to reach and rescue the victim. A mission is considered complete when the robot successfully exits the evacuation zone. Each team has 8 minutes to complete the test, demonstrating problem-solving skills, precision and real-time adaptation. The rules also include surprise missions that test the team's design flexibility.

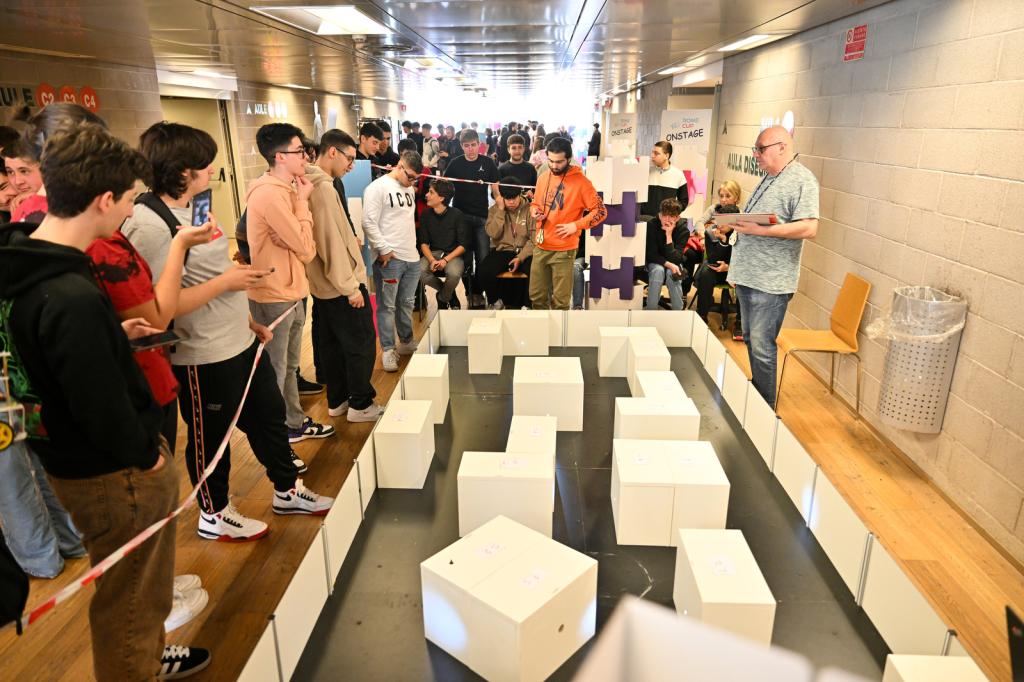
EXPLORER ROBOTS
Autonomous mini robots designed to move around an unknown space and identify light sources (junior) or environmental signals such as gas or sounds (senior) compete. The aim is to simulate real-life exploration and environmental monitoring scenarios. The competition field is only revealed to participants 10 minutes before the competition, making the robots' ability to adapt crucial. Inside the competition area, marked by a 30 cm high white border, there are white parallelepiped-shaped obstacles (400 x 220 x 300 mm), arranged to form corridors at least 30 cm wide. The robots must avoid the obstacles, locate the signals and indicate their presence with lights or sounds. The edges of the field are considered obstacles in their own right. The tests are structured in several sessions of approximately 3 minutes each, with procedures established by the jury. The category encourages the development of skills in sensor technology, environmental intelligence and robotic autonomy, emphasising problem solving and real-time responsiveness.
CREATIVE PERFORMANCES (ON STAGE)
Teams are asked to design, build and programme robots capable of performing creatively, through performances that combine technology, storytelling and entertainment. The robots can dance, act, interact with humans or with each other, using sensors, actuators, voice commands and other innovative elements. The ability to combine different technologies with originality, engaging the audience and making the scene dynamic and memorable is valued. During the performance, which lasts a maximum of two minutes, team members can also take to the stage and actively participate in the show alongside their robots. Teams are assessed on several aspects: a technical project document (TPD) describing the engineering solutions adopted; a technical demonstration and an interview; and the actual stage performance.

SUPERTEAM
The SuperTeam championship transforms the traditional challenge between rescue robots into a competition based on cooperation and knowledge exchange between students from different schools. Each SuperTeam is made up of two teams paired by lottery, which compete side by side, each with their own robot, on a field divided in half with different levels of difficulty. The challenge requires the robots to complete all the typical Rescue Line challenges within a maximum time of 8 minutes: following a marked line, avoiding obstacles, moving objects and rescuing victims. Compared to the traditional competition, the SuperTeam version introduces surprise missions and a level of unpredictability that stimulates problem solving, communication and adaptability. The team with the highest score, combining technical effectiveness and collaboration, wins. The challenge changes every year, following the general rules of the international regulations and specific regulations drawn up specifically for this competition.

ROBOTIC ARMS
The challenge is to design, build and programme robotic arms capable of interacting intelligently and safely with humans and the surrounding environment. The focus is on collaborative arms, tools that support humans in their daily activities and are able to communicate with other devices, the environment and even other robots. The objective is not only technical but also relational: to create systems that can operate in real-life scenarios, respecting safety, efficiency and cooperation. The competition is open to robotic arms made from pre-assembled kits, ready-to-buy devices and arms partially or completely designed and built by students. The challenge encourages the integration of mechanics, electronics, automation and programming, offering a concrete opportunity to experiment with the potential of robotics applied to everyday life.




